














 5 / 13
5 / 13

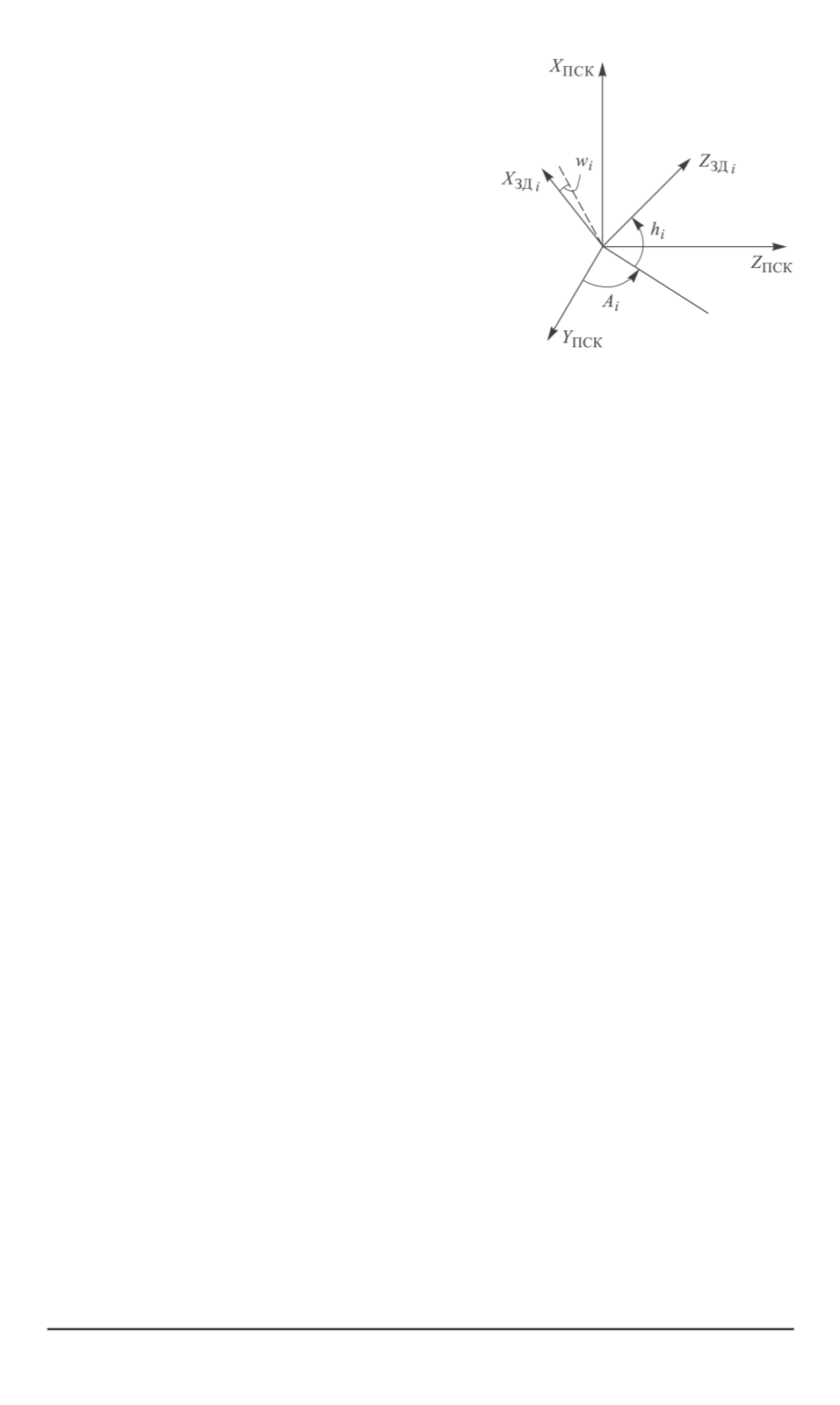
Рис. 4. Связь ПСК и системы
координат ЗД
На первом этапе режима калибров-
ки блока ЗД уточняется расчет взаимно-
го положения ЗД. Данный режим реали-
зуется за счет использования измерений
осуществляемых ЗД.
На втором этапе режима калибровки
уточняется взаимное расположение ба-
зового ЗД и ПСК. Данный режим реали-
зуется за счет совместной работы ЗД и
аппаратуры ДЗЗ. Вычисления оптималь-
но проводить на наземном пункте обра-
ботки информации, а затем передавать
калибровочные коэффициенты для запи-
си в память аппаратуры.
Расчет равноточной ориентации приборной системы коорди-
нат в ИСК.
На аппаратуру в общем случае будет устанавливаться
n
≥
2
ЗД, расположенных оптимальным образом. Каждый
i
-й ЗД бу-
дет устанавливаться с углами (
A
i
,
h
−
i
,
w
i
) в ПСК (рис. 4).
Матрица перехода от СК ЗД к ПСК будет иметь вид
M
ЗД
→
ПСК
=
=
cos
h
i
cos
w
i
sin
A
i
sin
w
i
−
cos
A
i
cos
w
i
sin
h
i
−
cos
A
i
sin
w
i
−
sin
A
i
cos
w
i
sin
h
i
−
cos
h
i
sin
w
i
sin
A
i
cos
w
i
+ cos
A
i
sin
h
i
sin
w
i
sin
A
i
sin
h
i
sin
w
i
−
cos
A
i
cos
w
i
sin
h
i
cos
A
i
cos
h
i
sin
A
i
cos
h
i
.
(2)
Рассмотрим два ЗД: ЗД1 и ЗД2. Выберем ЗД1 за базовый. Матрицу
перехода от СК ЗД2 к СК ЗД1 можно записать следующим образом:
M
ЗД2
→
ЗД1
=
M
ЗД2
→
ИСК
∙
M
ИСК
→
ЗД1
=
M
ЗД2
→
ПСК
∙
M
ПСК
→
ЗД1
,
(3)
где
M
ИСК
→
ЗД1
= (
M
ЗД1
→
ИСК
)
−
1
,
M
ПСК
→
ЗД2
= (
M
ЗД2
→
ПСК
)
−
1
вычисляют
на основе формул (1) и (2).
Запишем произведение матриц из формулы (3) как
M
ЗД2
→
ИСК
∙
M
ИСК
→
ЗД1
=
R
=
r
11
r
12
r
13
r
21
r
22
r
23
r
31
r
32
r
33
.
(4)
Найдем значения элементов матрицы, собрав их вместе, получим:
r
11
= cos
β
1
cos
β
2
sin
θ
1
sin
θ
2
+
+(sin
α
1
cos
θ
1
+ cos
α
1
sin
β
1
sin
θ
1
)(sin
α
2
cos
θ
2
+ cos
α
2
sin
β
2
sin
θ
2
)+
+(cos
α
1
cos
θ
1
−
sin
α
1
sin
β
1
sin
θ
1
)(cos
α
2
cos
θ
2
−
sin
α
2
sin
β
2
sin
θ
2
);
r
12
= cos
β
1
cos
β
2
cos
θ
1
sin
θ
2
−
−
(sin
α
1
sin
θ
1
−
cos
α
1
sin
β
1
cos
θ
1
)(sin
α
2
cos
θ
2
+ cos
α
2
sin
β
2
sin
θ
2
)
−
−
(cos
α
1
sin
θ
1
+ sin
α
1
sin
β
1
cos
θ
1
)(cos
α
2
cos
θ
2
−
sin
α
2
sin
β
2
sin
θ
2
);
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2015. № 2 19