Вычисленная текущая константа
K
системы будет в этом случае
искажаться тем больше, чем больше эксцентриситет траектории.
Разность
t
2
−
t
1
в этом случае будет зависеть от размеров
A
и
a
.
Введем коэффициент
γ
=
A
a
=
R
2
−
e
2
r
2
−
e
2
. При прохождении линии
сканирования через центры полей зрения коэффициент
γ
будет иметь
определенное значение, зависящее от углов полей зрения объектива.
При наличии эксцентриситета
e
коэффициент
γ
будет меняться. Это
изменение позволяет вносить поправку в вычисляемую константу
K
.
При этом объект обязательно должен попасть во внутреннее поле си-
стемы, характеризующееся радиусом
r
.
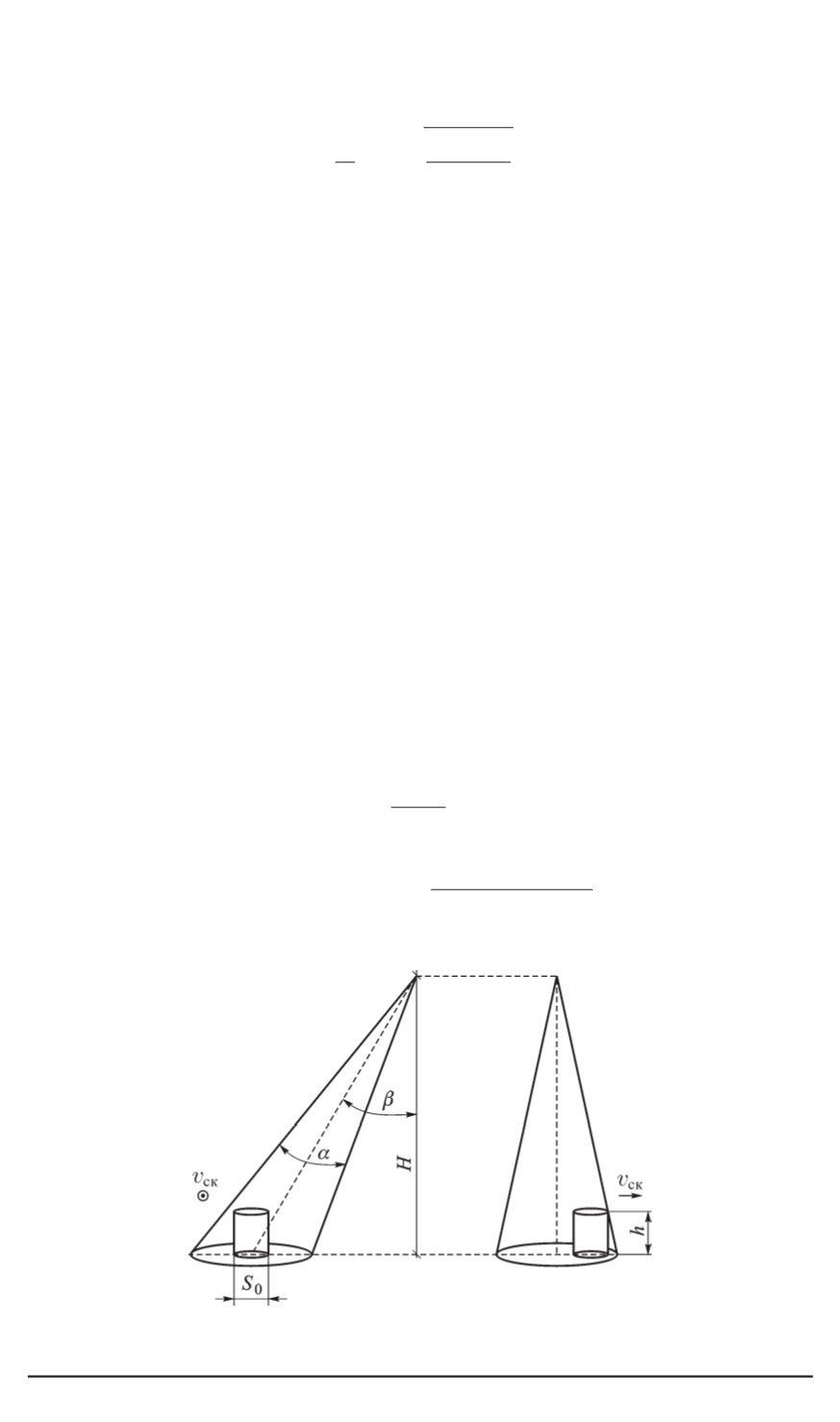
Рассмотрим случай трехмерного объекта с ограниченной высотой,
не выводящей его за пределы конуса поля зрения, как показано на
рис. 4. В этом случае импульсы, возникающие на приемниках излу-
чения, будут увеличиваться по амплитуде и длительности в силу уве-
личения совокупной площади объекта и времени входа в поле зрения
и выхода из него. Однако соотношение (9) при этом сохраняется, а
величины
Δ
T
и
S
0
изменяются в сторону увеличения. Если систему
откалибровать по объемному объекту с нахождением соответствую-
щей константы
K
, то по такому объекту можно определять примерную
дальность до него.
Если же система была откалибрована по плоскому объекту, а ре-
альный сканируемый объект имеет третью координату (объемный объ-
ект), то возникает ошибка в определении дальности. Дальность опре-
деляется из соотношения
D
=
K S
0
Δ
T
, где
Δ
T
— реальная временная
характеристика, полученная в результате измерения, причем в данном
случае, как следует из рис. 4,
Δ
T
=
S
0
+
h
tg(
α/
2)
v
ск
. Очевидно, что для
относительных ошибок
γ
для дальности и временного интервала
Δ
T
,
Рис. 4. Сканирование трехмерного объекта
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2010. № 4 67


