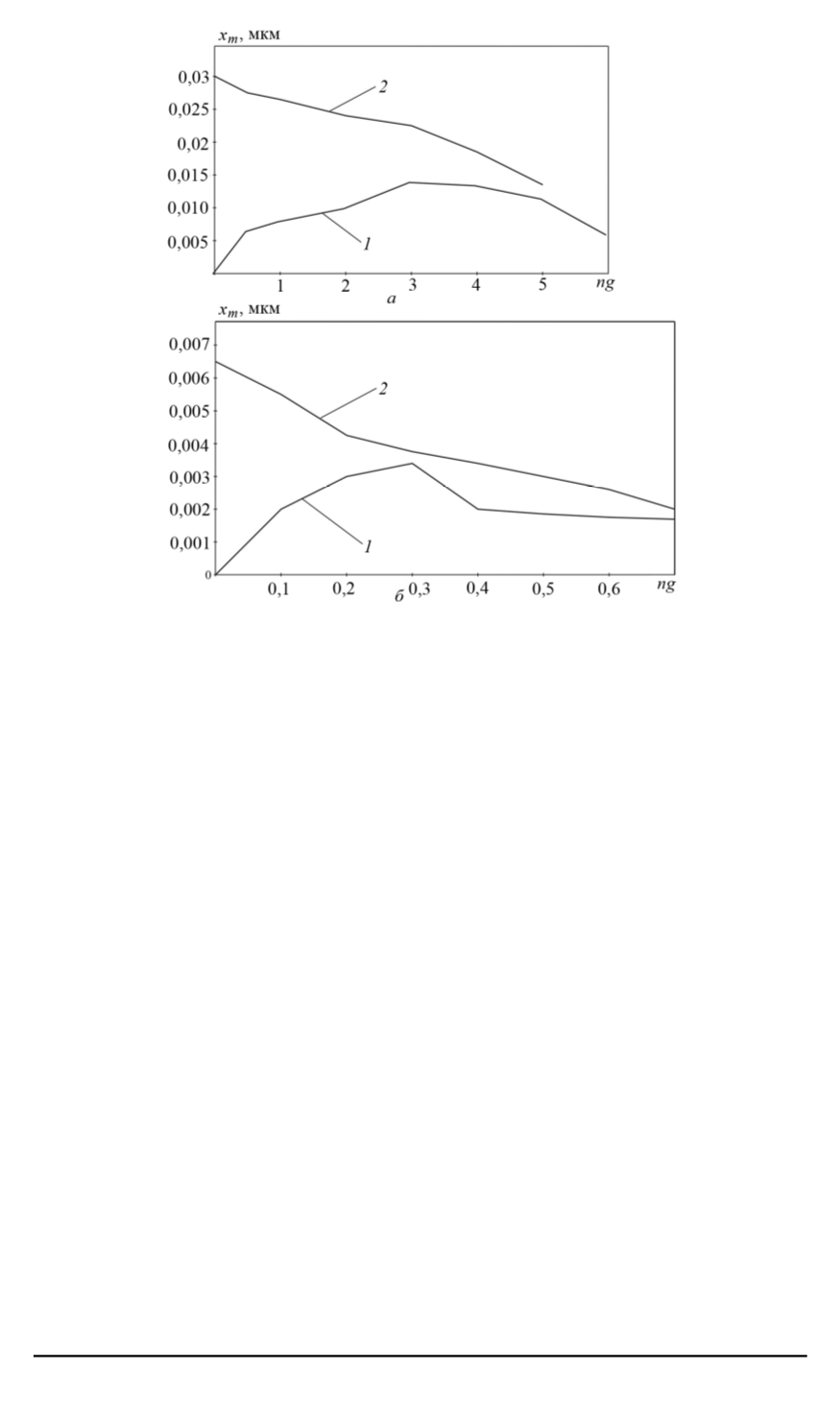
Рис. 5. Зависимость амплитуды вынужденных колебаний от коэффициента пе-
регрузки при
U
оп
= 800
(
а
) и 300 B (
б
) для первого (
1
) и второго (
2
) вариантов
управления потенциалами
способности импульсного подвеса и подвеса на постоянном токе с
опорным напряжением 400 В (максимальное напряжение на электро-
дах 800 В).
Результаты моделирования.
Зависимости амплитуды вынужден-
ных колебаний от коэффициента перегрузки для двух вариантов упра-
вления и при опорных напряжениях 800 и 300 В приведены на рис. 5.
Значения амплитуд и тенденция их изменения подтверждают правиль-
ность расчетных соотношений (7) и (8). При первом варианте упра-
вления и
U
оп
= 300
B амплитуда колебаний не превышает 0,0035 мкм,
а при
U
оп
= 800
B — 0,013 мкм (расчетное значение 0,011 мкм). Такой
уровень колебаний соизмерим с уровнем шумов. Кроме того, приме-
нение авторефлекторных датчиков измерения углового положения оси
ротора, включенных по дифференциальной схеме, ослабляет влияние
линейных смещений (следовательно, и колебаний) центра ротора.
Как было отмечено ранее, погрешность измерения датчика переме-
щений возникает вследствие смещения центра ротора за время
τ
0
, при-
чем значение этой погрешности увеличивается с возрастанием скоро-
сти смещения ротора. Примем, что скорость смещения достигает наи-
большего значения при воздействии ступенчатой перегрузки, близкой
к максимальной. Для оценки погрешности последовательно модели-
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2014. № 1 29


