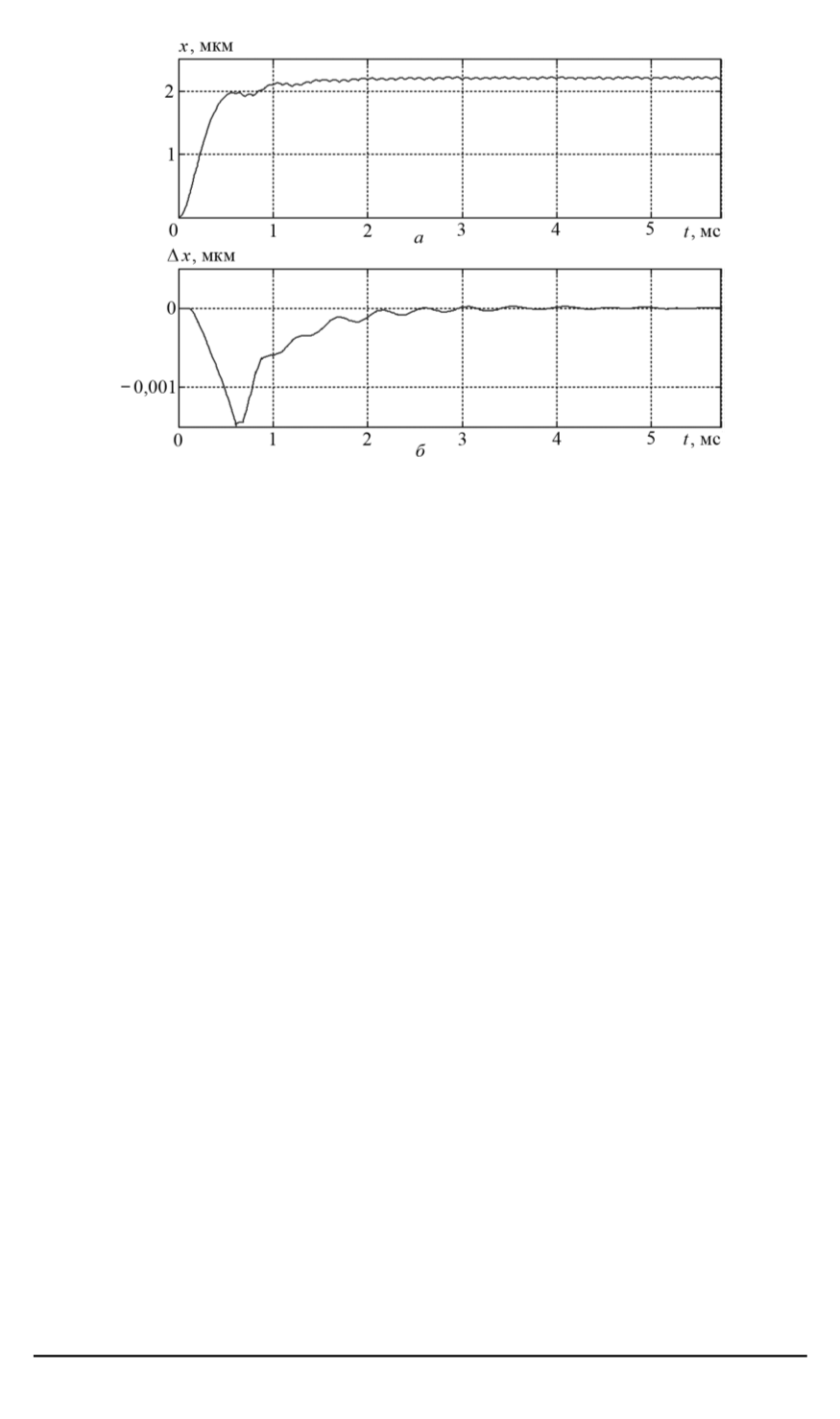
Рис. 6. Результаты моделирования переходного процесса при действии перегруз-
ки (
а
) и погрешности импульсного датчика перемещений (
б
)
ровались два переходных процесса смещения центра при воздействии
перегрузки 6
g
(подвес рассчитан на максимальную перегрузку 7
g
).
Первый переходный процесс
x
(
t
)
(рис. 6,
а
) получен на модели (см.
рис. 4), имеющей в составе блок импульсного датчика перемещений,
который реализован путем измерения разности напряжений с электро-
дов 1 и 2 на этапе их заряда (см. (9)).
Второй переходный процесс
ˉ
x
(
t
)
был получен на той же моде-
ли (см. рис. 4), но блок импульсного датчика, был заменен безынер-
ционным звеном с коэффициентом передачи, равным статическому
коэффициенту усиления импульсного датчика. Разность переходных
процессов (погрешность измерения)
Δ
x
(
t
) =
x
(
t
)
−
ˉ
x
(
t
)
показана на
рис. 6,
б
и не превышает 0,0015 мкм, что соизмеримо с уровнем шумов.
Заряд на роторе электростатического подвеса возникает или на эта-
пе первоначального всплытия (если используются заземленные упо-
ры) или в процессе эксплуатации в результате действия темновых
токов и микроразрядов. В работе [2] было доказано, что применение
в подвесе на постоянном токе разрезных электродов по каждой полу-
оси с разнополярными опорными напряжениями позволяет не только
уменьшить заряд ротора, приобретаемый при первоначальном всплы-
тии, но и в значительной степени ослабить его влияние на точность
центрирования. В рассматриваемом варианте подвеса также приме-
няются разрезные электроды и разнополярные источники, поэтому
выводы, приведенные в работе [2], можно распространить и на им-
пульсный подвес. Точность центрирования зависит в основном от двух
факторов: 1) коэффициента усиления в контуре стабилизации, который
30 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2014. № 1


