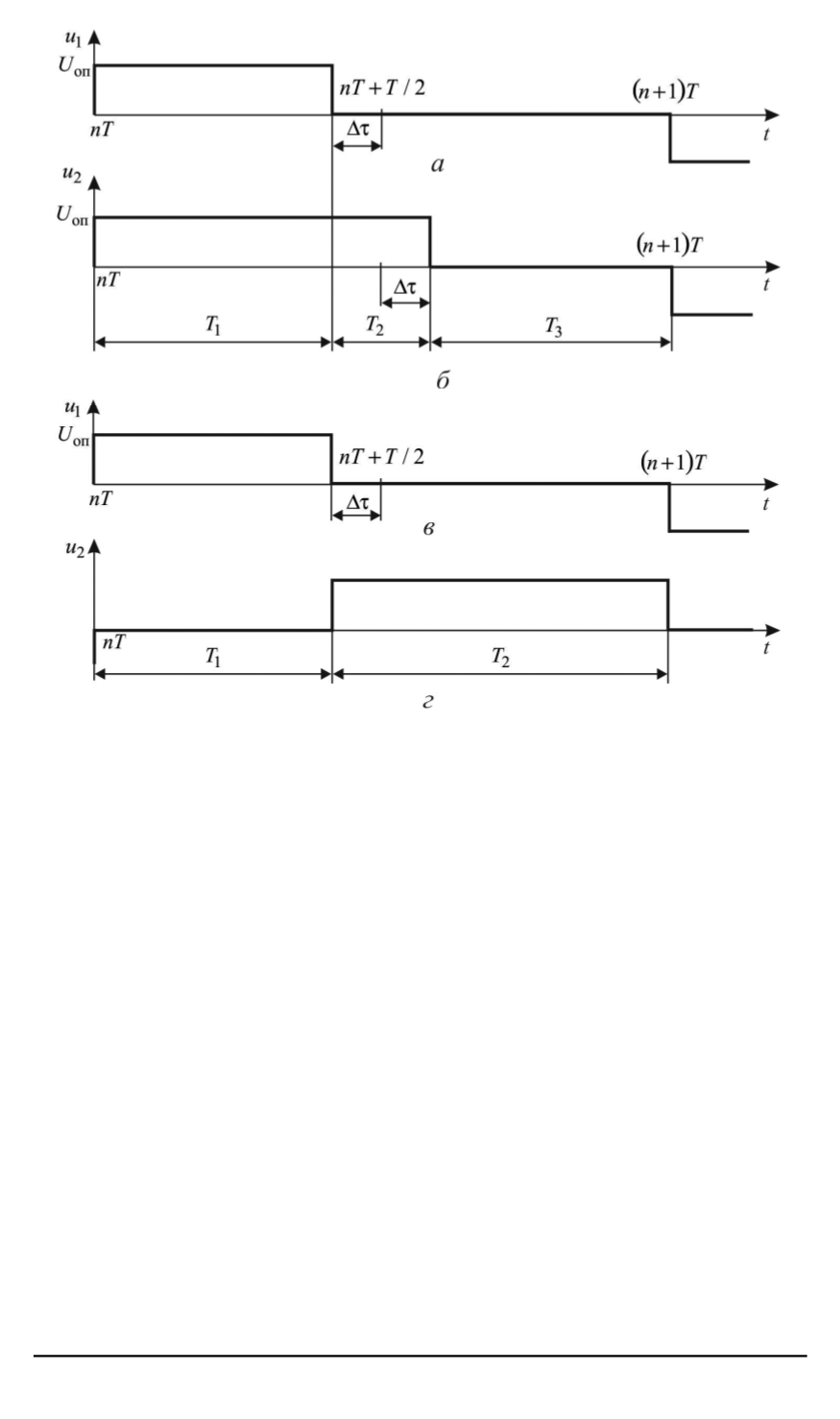
Рис. 2. Первый (
а
,
б
) и второй (
в
,
г
) варианты управления потенциалами на
электродах 1 (
а
,
в
) и 2 (
б
,
г
)
наведенный потенциал ротора в подвесах как с разрезными, так и с
неразрезными электродами.
В рассматриваемых подвесах в силу импульсного характера сило-
вого воздействия имеют место вынужденные колебания центра рото-
ра. Основываясь на некоторых допущениях, проведем сравнительный
анализ вынужденных колебаний для двух вариантов управления по-
тенциалами.
Первый вариант управления потенциалами.
Допустим, что на
ротор действует переносное ускорение
ng
(кратность перегрузки
n
) в
положительном направлении оси
x
(см. рис. 1). При первом варианте
управления это приведет к сокращению на
Δ
τ
длительности импуль-
са на электроде 1 и ее увеличению на электроде 2 (см. рис. 2,
а
,
б
).
Разобьем период ШИМ на три однородных интервала. На первом
интервале
T
1
=
T/
2
−
Δ
τ
высоковольтные напряжения на электро-
дах 1 и 2 равны. При малости смещений ротора из центра подве-
са пренебрежем дестабилизирующей (пропорциональной смещению)
составляющей пондеромоторной силы. В этих условиях примем, что
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2014. № 1 23


