














 9 / 16
9 / 16

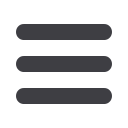
Рис. 1. Кинематическая схема двух-
звенного манипулятора
мерна, и, следовательно, гаранти-
руется асимптотическая устойчи-
вость решения.
Динамическая модель мани-
пулятора.
Для того чтобы проде-
монстрировать целесообразность
предлагаемого в предыдущем раз-
деле подхода, методика AFSMC
применилась для системы управле-
ния двухзвенным манипулятором.
Кинематическая схема манипуля-
тора показана на рис. 1.
Стержневые звенья манипулятора имеют длину
L
1
и
L
2
. Массы
звеньев обозначены через
M
1
и
M
2
. Пусть
θ
1
и
θ
2
обозначают относи-
тельные углы поворота (см. рис. 1).
Значения координат конечной точки первого звена
x
1
=
L
1
cos
θ
1
, , y
1
=
L
1
sin
θ
1
.
(37)
Аналогично, для второго звена
x
2
=
L
1
cos
θ
1
+
L
2
cos(
θ
1
+
θ
2
);
(38)
y
2
=
L
1
sin
θ
1
+
L
2
sin(
θ
1
+
θ
2
)
.
(39)
Относительные углы поворота ограничены соотношениями
(
0
< θ
1
<
π
2
;
−
π < θ
2
<
0
.
(40)
Решая прямую задачу кинематики, можно получить совокупность
точек, определяющих положение конечной точки второго звена для
различных комбинаций относительных углов поворота
θ
1
и
θ
2
(рис. 2).
Значения углов относительного поворота
θ
1
и
θ
2
, в свою очередь,
могут быть получены путем решения обратной задачи кинематики. Из
уравнений (38), (39) нетрудно найти:
⇒
cos
θ
2
=
x
2
2
+
y
2
2
−
L
2
1
−
L
2
2
2
L
1
L
2
,
K
1
=
L
1
+
L
2
cos
θ
2
;
K
2
=
L
2
sin
θ
2
;
⇒
θ
1
= arctg
y
x
−
arctg
K
2
K
1
.
Используя уравнения Лагранжа и Эйлера – Лагранжа, получаем
уравнения динамики двухзвенного манипулятора [11]:
l
(
M
1
+
M
2
)
L
2
1
¨
θ
1
+
M
2
L
1
L
2
¨
θ
2
cos(
θ
1
−
θ
2
)+
+
M
2
L
1
L
2
˙
θ
2
2
sin(
θ
1
−
θ
2
) + (
M
1
+
M
2
)
gL
1
cos
θ
1
= T
θ
1
;
(41)
38 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2015. № 6