














 3 / 13
3 / 13

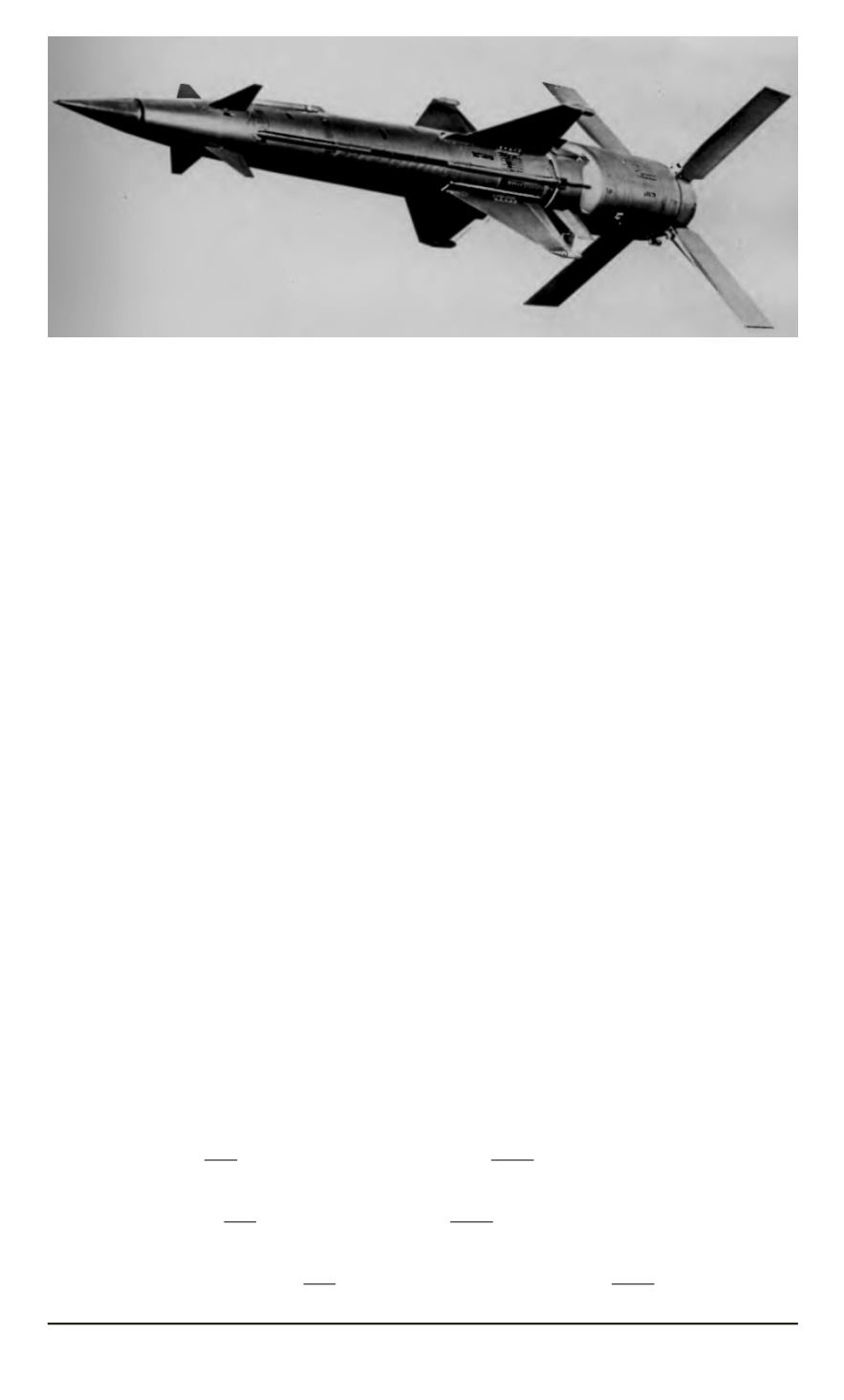
Рис. 1. Внешний вид ракеты В-601П
программное устройство, которое определяет ее угловое и простран-
ственное положение, а также вырабатывает необходимые сигналы
управления.
Расчеты траекторий движения ЗУР и РМ проводятся при следую-
щих положениях и допущениях:
— движение объектов управления (ОУ) рассматривается в нормаль-
ной земной (стартовой) системе координат (НЗСК), которая по-
лагается инерциальной;
— параметры атмосферы соответствуют ГОСТ 4401–81 “Атмосфе-
ра стандартная. Параметры”, ветер отсутствует;
— вращение Земли и ее кривизна поверхности не учитываются;
— ОУ движется как материальная точка;
— перекрестные связи в каналах тангажа и рысканья отсутствуют;
— балансировка происходит мгновенно;
— ОУ стабилизирован по крену;
— координаты местоположения ЗРК С-125М для РМ заранее из-
вестны;
— влияние радиогоризонта при преодолении ЗРК С-125М не рас-
сматривается.
Движение ОУ описывается системой дифференциальных урав-
нений
m
dV
dt
=
P
cos
α
cos
β
−
C
xa
S
ρV
2
2
−
mg
sin Θ;
mV
d
Θ
dt
=
P
sin
α
+
C
ya
S
ρV
2
2
−
mg
cos Θ;
−
mV
cos Θ
d
Ψ
dt
=
−
P
cos
α
sin
β
+
C
za
S
ρV
2
2
;
(1)
36 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2015. № 1