














 2 / 21
2 / 21

уравновешиваний и оптимизации управления многообъектными мно-
гокритериальными системами уровней. В рамках исследования фор-
мируются стратегии межуровневого координирования на основе
обобщенного иерархического координирования по Штакельбергу
[1–3]. Рассматривается получение поуровневых Парето-оптимальных
стабильно-эффективных компромиссов на основе модифицирован-
ного равновесно-арбитражного алгоритма [3–5]. Сформирован ал-
горитм оптимизации иерархической системы управления на основе
разработанной методики получения координированных стабильно-
эффективных компромиссов [2, 6, 7]. Приведено обобщение этого
метода и рассмотрены примеры его применения.
Структура и модель двухуровневой системы [2].
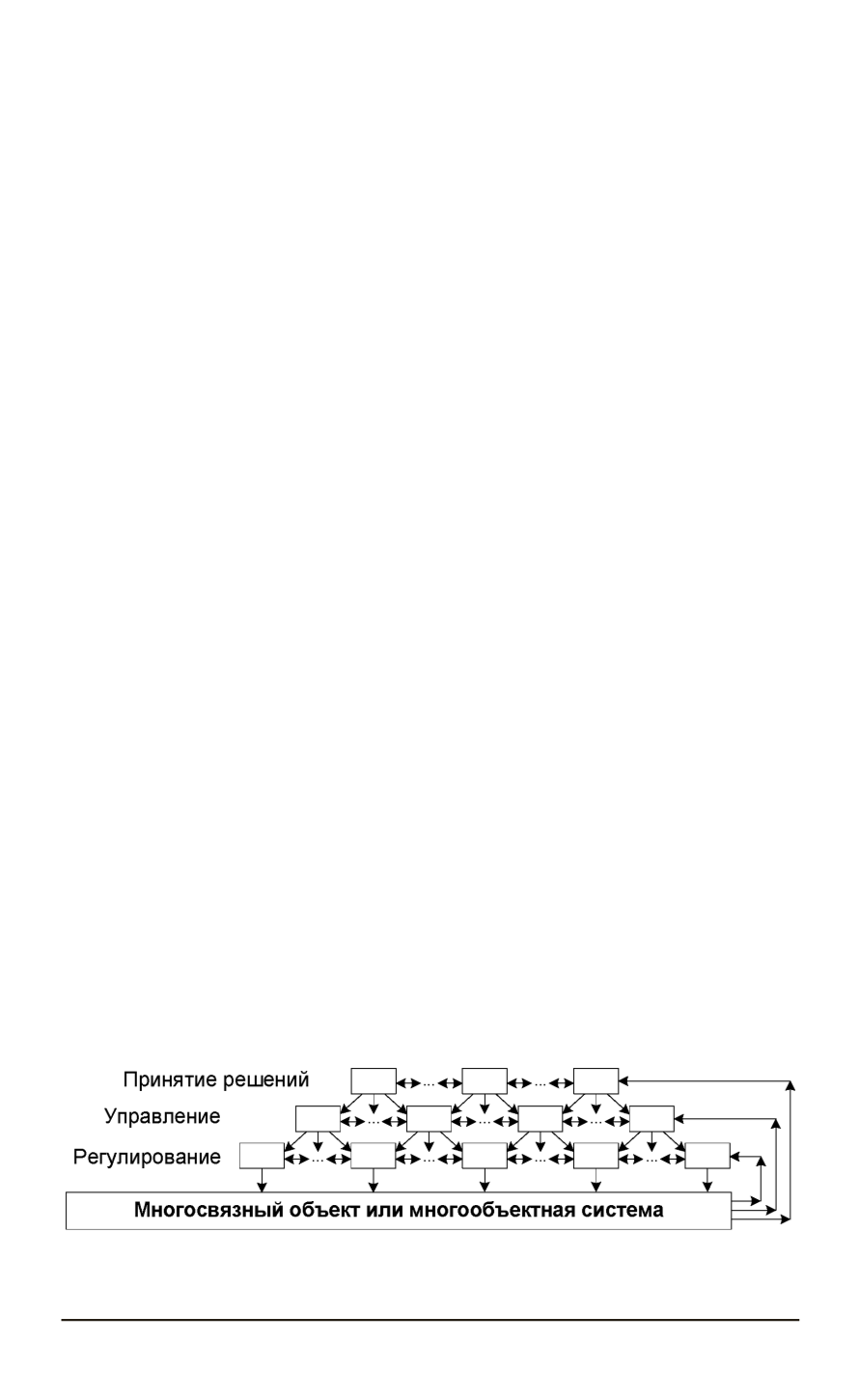
Рассматрива-
ется методика оптимизации структурно и функционально сложных
АСУ в типичной форме многоуровневой иерархической структуры
с поуровневыми многоподсистемными (многоканальными, много-
вязными) многокритериальными системами (ММС) регулирования
(ММС-Р), управления (ММС-У) и принятия решений (ММС-ПР),
представленной на рис. 1.
Примером представления части такой многоуровневой АСУ и
практически полезной моделью для исследования является двухуров-
невая математическая модель наведения–стабилизации многоканаль-
ной СУ беспилотного летательного аппарата (СУ ЛА), приведенная
на рис. 2, где в соответствии с терминологией [8] введены следующие
обозначения: КСУ, КССт — каналы системы управления и системы
стабилизации ЛА;
u
1
,
2
— сигналы наведения ЛА (координирующие
воздействия на систему стабилизации);
k
у
, k
к
— управляющие пара-
метры, коэффициенты передачи устройства выработки команд КСУ
(метода наведения) и чувствительного элемента координатора цели;
k
дг
, k
длу
— управляющие параметры, коэффициенты передачи диффе-
ренцирующего гироскопа и датчика линейных ускорений;
δ
в
, δ
н
и
δ
э
—
управляющие воздействия рулей высоты, рулей направления и эле-
ронов системы стабилизации (исполнительные воздействия на ЛА);
ϑ, ψ
,
γ
— углы тангажа, рыскания и крена;
j
н
— нормальные ускорения
ЛА;
X, Y, Z
(
X
ц
, Y
ц
, Z
ц
)
— координаты центра масс
O
0
беспилотного
Рис. 1. Вариант функциональной структуры многоуровневой системы управ-
ления
14 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2015. № 4