














 7 / 21
7 / 21

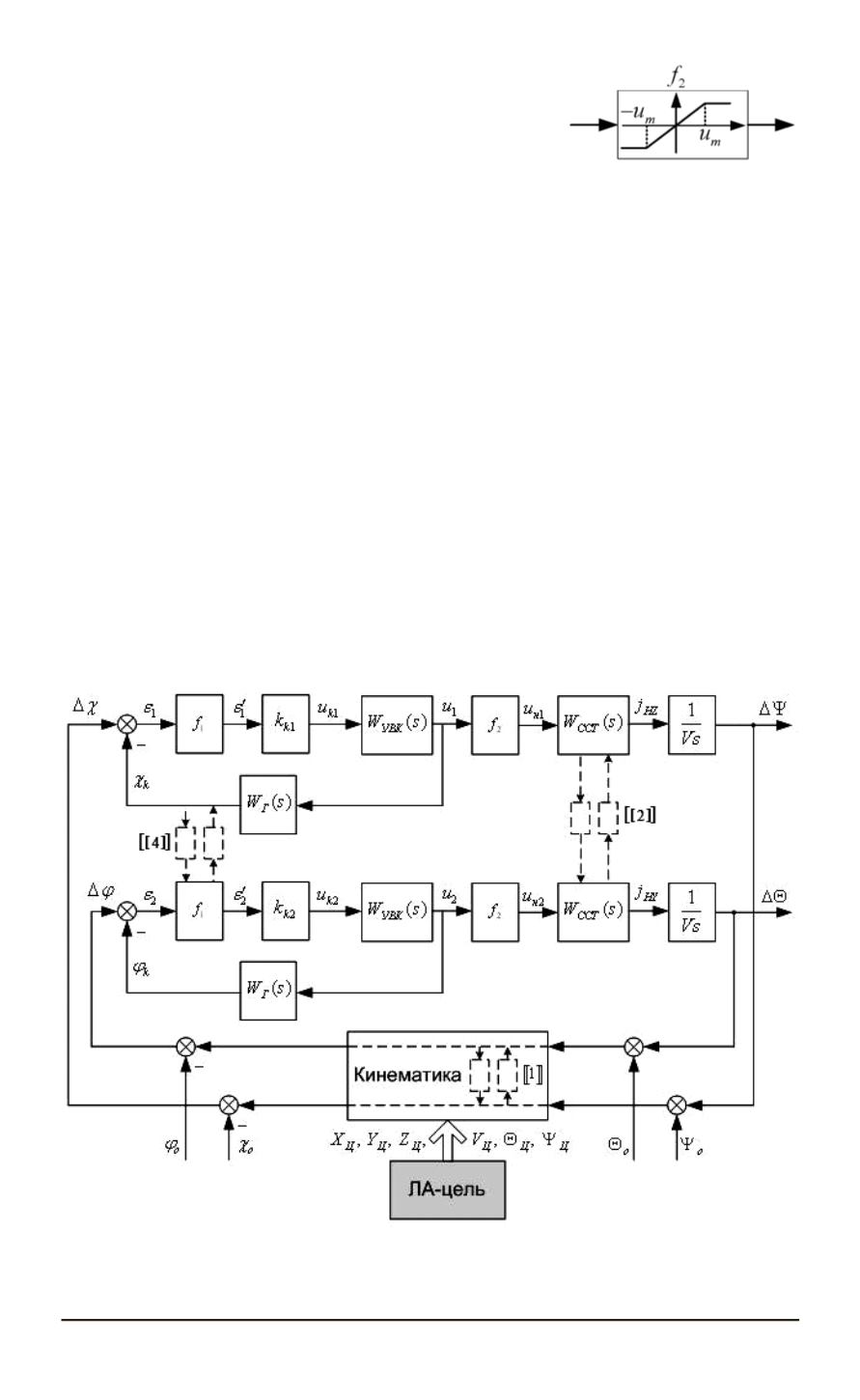
Рис. 5. Ограничение сиг-
нала
u
l
(
l
= 1
,
2
)
Передаточная функция устройства выра-
ботки команд (УВК) в простейшем виде [8]
имеет вид
W
УВК
(
s
) =
k
yl
, где
k
у
l
— коэффи-
циент передачи УВК КСУ-
l
, определяющий
качество метода пропорционального наведе-
ния [9].
В целом структурная схема двухуровне-
вой двухканальной системы “наведение–стабилизация” беспилотно-
го ЛА с перекрестными связями приведена на рис. 6. В силу то-
го, что канал системы стабилизации по углу крена отрабатыва-
ет только возмущающее воздействие и на него не поступает сиг-
нал наведения с уровня управления, то на структурной схеме (см.
рис. 6) система стабилизации имеет вид двухканальной системы.
Влияние канала крена на управляющие воздействия на каждом
из уровней иерархии учитывается в математическом описании си-
стемы стабилизации и через перекрестные связи на каждом из
уровней.
Концепция и определение обобщенного управления многоуров-
невой системой [1, 2].
Методика оптимизации формируется на осно-
ве комбинации методов проектирования иерархических распределен-
ных систем (ИРС) для выбора оптимальной функциональной струк-
Рис. 6. Структурная схема двухканальной системы “наведение–стабилизация”
беспилотного летательного аппарата
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2015. № 4 19